RP2040 has Dual Cortex M0+ processor cores which can run upto 133MHz independent of each other. However, the second core (core 1) is asleep on boot and needs to be waken up by a function call from the first core (core 0). This program demonstrates the result of any arising contention between core 0 and core 1 for a shared memory space. The resources for the project include the C SDK User Guide, the RP2040 Datasheet and Prof. Hunter's website.
/*
* Parth Sarthi Sharma (pss242@cornell.edu)
* Code based on examples from Raspberry Pi Foundation.
* This code is a demonstration of contention between the two cores.
* The code wakes up core 1 from its slumber and increments a
* common variable on each core.
*/
#include <stdio.h> //The standard C library
#include "pico/stdlib.h" //Standard library for Pico
#include "pico/time.h" //The pico time library
#include "pico/multicore.h" //The pico multicore library
#include "hardware/gpio.h" //The hardware GPIO library
#include "hardware/timer.h" //The hardware timer library
#define BUTTON 5 //The pushbutton
int i = 0; //The number to be incremented
int core0 = 0, core1 = 0; //Counters for each core
void core1_entry(){ //The program running on core 1
while(1){ //While eternity
if(i < 100000000){ //As long as i is less than 100000000
i++; //Increment i
core1++; //Increment core 1
}
}
}
int main(){ //The program running on core 0
stdio_init_all(); //Initialize all of the present standard stdio types that are linked into the binary
gpio_init(BUTTON); //Initialize the pushbutton pin
gpio_set_dir(BUTTON, GPIO_IN); //Initialize the pushbutton pin to be input
multicore_launch_core1(core1_entry); //Reset core1 and enter the core1_entry function on core 1 using the default core 1 stack
uint64_t startTime = get_absolute_time(); //Fetch the time at which the CPU starts executing the program
printf("Start Time: %lld.\n", startTime); //Print out the time start time
while(1){ //While eternity
if(i < 100000000){ //As long as i is less than 100000000
i++; //Increment i
core0++; //Increment core 0
}
else if(i == 100000000){ //As soon as i hits 100000000
uint64_t timeTaken = get_absolute_time() - startTime; //Get the time it took to finish the job
printf("Time Taken: %lld.\n", timeTaken); //Print out the time it took to finish the job
printf("Core0: %d, core1: %d\n", core0, core1); //Print out the number of increments on core 0 and core 1
i++; //Increment i to stop printing
}
else if(gpio_get(BUTTON)){ //If the button has been pressed
i = 0; //Reset i
core0 = 0; //Reset core 0 counter
core1 = 0; //Reset core 1 counter
startTime = get_absolute_time(); //Reset the start time
printf("Start Time: %lld.\n", startTime); //Print out the new time
}
}
}
The first lines of code in the C source file include some header files. One of these is standard C headers (stdio.h) and the others are headers which come from the C SDK for the Raspberry Pi Pico. The first of these, pico/stdlib.h is what the SDK calls a "High-Level API." These high-level API's "provide higher level functionality that isn’t hardware related or provides a richer set of functionality above the basic hardware interfaces." The architecture of this SDK is described at length in the SDK manual. All libraries within the SDK are INTERFACE libraries.
The next includes pull in hardware APIs which are not already brought in by pico/stdlib.h. These include hardware/gpio.h, hardware/timer.h, pico/time.h and pico/multicore.h. As the names suggest, these interface libraries give us access to the API's associated with the hardware GPIO, hardware timer, pico time and pico multicore on the RP2040.
Don't forget to link these in the CMakeLists.txt file!
#include <stdio.h>
#include "pico/stdlib.h"
#include "pico/time.h"
#include "pico/multicore.h"
#include "hardware/gpio.h"
#include "hardware/timer.h"
The next section of the code is the #define's and the global variables which will be used throughout the code. The #define is the pushbutton pin declaration on GPIO 5. The variables declared are the increment variable i and the tracker variables core0 and core1. The increment variable i is shared by both cores as it is declared in the global memory space.
#define BUTTON 5
int i = 0;
int core0 = 0, core1 = 0;
The core 1 function is the function which runs on the core 1 once it wakes up from its slumber. In other terms, this function is the main() function for core 1 and runs independent of the actual main() function running on core 0 (unless there is an intra-core communication). The core1_entry() function checks if i is less than 100000000. If it is, it increments both i and core1 and repeats the process for eternity.
void core1_entry() {
while(1){
if(i < 100000000){
i++;
core1++;
}
}
}
stdio_init_all();
In the next 2 lines of the code, I initialized the button pin and configured it to be the input pin. The gpio_init() function is used to initialize the pin and the gpio_set_dir() function us used to set the pin direction which can be GPIO_OUT (output) or GPIO_IN (input).
gpio_init(BUTTON);
gpio_set_dir(BUTTON, GPIO_IN);
In order to wake up the core 1 from sleep, I used the multicore_launch_core1() function. This function resets core 1 and enters the given function on core 1 using the default core 1 stack (below core 0 stack).
multicore_launch_core1(core1_entry);
This part of the program is quite similar to the core1_entry() function but has some additional functionality. It runs on the core 0 and follows the following algorithm:
i is less than 100000000, increment i and core0 tracker.i is equal to 100000000, calculate the time taken by core 0 to finish the job and print it out. Also, print out the values of core0 and core1 tracker variables. Increment i to avoid multiple prints.i is greater than 100000000 and the button has been pushed, reset i and the tracker variables and the start time to start the job again.uint64_t startTime = get_absolute_time();
printf("Start Time: %lld.\n", startTime);
while(1){
if(i < 100000000){
i++;
core0++;
}
else if(i == 100000000){
uint64_t timeTaken = get_absolute_time() - startTime;
printf("Time Taken: %lld.\n", timeTaken);
printf("Core0: %d, core1: %d\n", core0, core1);
i++;
}
else if(gpio_get(BUTTON)){
i = 0;
core0 = 0;
core1 = 0;
startTime = get_absolute_time();
printf("Start Time: %lld.\n", startTime);
}
}
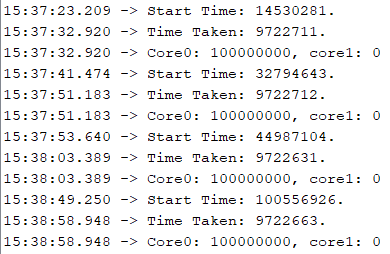
In order to view the output, I used the serial monitor provided by the Arduino IDE. As it is quite evident from the provided data, core 0 takes priority over core 1 when both the cores try to simultaneously access a part of the shared memory. This is why, all the increments take place in core 0.
cmake_minimum_required(VERSION 3.13)
include(pico_sdk_import.cmake)
project(MultiCoreCommonVarPerformaceCompDualCore)
pico_sdk_init()
add_executable(MultiCoreCommonVarPerformaceCompDualCore MultiCoreCommonVarPerformaceCompDualCore.c)
pico_enable_stdio_usb(MultiCoreCommonVarPerformaceCompDualCore 1)
pico_enable_stdio_uart(MultiCoreCommonVarPerformaceCompDualCore 1)
pico_add_extra_outputs(MultiCoreCommonVarPerformaceCompDualCore)
target_link_libraries(MultiCoreCommonVarPerformaceCompDualCore pico_stdlib pico_time pico_multicore hardware_gpio)