This program was an introduction to the timer the system timer peripheral on RP2040. It provides a global microsecond timebase for the system, and generates interrupts based on this timebase. This programs fetches and prints the absolute time (the time elapsed since boot) on the serial monitor. The resources for the project include the C SDK User Guide, the RP2040 Datasheet and Prof. Hunter's website.
The timer peripheral on RP2040 supports:
/*
* Parth Sarthi Sharma (pss242@cornell.edu)
* Code based on examples from Raspberry Pi Foundation.
* The code fetches the absolute time into a variable and prints out
* the time on the serial monitor.
*/
#include <stdio.h> //The standard C library
#include "pico/stdlib.h" //Standard library for Pico
#include "pico/time.h" //The pico time library
int main(){
stdio_init_all(); //Initialize all of the present standard stdio types that are linked into the binary
while(1){ //While eternity
uint64_t time = get_absolute_time(); //Get a representation of the current time
printf("Time: %lld\n", time); //Print out the time on the serial monitor
sleep_ms(1000); //Sleep for 1000 milliseconds
}
}
The first lines of code in the C source file include some header files. One of these is standard C headers (stdio.h) and the others are headers which come from the C SDK for the Raspberry Pi Pico. The first of these, pico/stdlib.h is what the SDK calls a "High-Level API." These high-level API's "provide higher level functionality that isn’t hardware related or provides a richer set of functionality above the basic hardware interfaces." The architecture of this SDK is described at length in the SDK manual. All libraries within the SDK are INTERFACE libraries.
The next include pulls in hardware API which is not already brought in by pico/stdlib.h. This is the include pico/time.h. As the name suggestes, this interface library gives us access to the API associated with the pico time on the RP2040.
Don't forget to link these in the CMakeLists.txt file!
#include <stdio.h>
#include "pico/stdlib.h"
#include "pico/time.h"
stdio_init_all();
For this code, the infinite while loop follows the following algorithm over and over again:
In order to fetch the absolute time, I used the get_absolute_time() function. This function returns the time since boot in microseconds as an unsigned 64-bit integer. Therefore, it is going to continue to run for 5851444 years after it boots up! Once the value is fetched, it is printed out on the serial monitor and the CPU sleeps for 1 second.
uint64_t time = get_absolute_time();
printf("Time: %lld\n", time);
sleep_ms(1000);
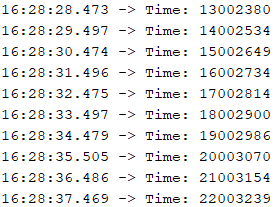
The output of the program is shown below. From the image it is verified that the time since boot (in microseconds) is being printed out at an interval of 1000 milliseconds.
cmake_minimum_required(VERSION 3.13)
include(pico_sdk_import.cmake)
project(TimerTest)
pico_sdk_init()
add_executable(TimerTest TimerTest.c)
pico_enable_stdio_usb(TimerTest 1)
pico_enable_stdio_uart(TimerTest 1)
pico_add_extra_outputs(TimerTest)
target_link_libraries(TimerTest pico_stdlib pico_time hardware_timer)